Here, We provide Computer Organization & Architecture GTU Paper Solution Summer 2022. Read the Full COA GTU paper solution given below.
Computer Organization & Architecture GTU Old Paper Winter 2022 [Marks: 70] : Click Here
(a) What is the binary and decimal equivalent of F8 hexadecimal value?
The binary equivalent of F8 hexadecimal value is 11111000, and its decimal equivalent is 248.
(b) Write Steps for two n digit numbers subtraction in base r.
To subtract two n-digit numbers in base r, follow these steps:
- Line up the digits of the two numbers by placing the digits of both numbers in the same column.
- Start from the rightmost digit and subtract the digits of the second number from the digits of the first number in the same column. If the digit in the first number is smaller than the digit in the second number, borrow 1 from the next column.
- Repeat step 2 for each column until all digits have been subtracted.
- Write the result of each subtraction below the line, keeping the digits aligned.
- If there are any borrow operations in step 2, subtract the borrowed value from the digit in the next higher column.
- Repeat step 5 until there are no more borrow operations.
- The final result is the difference of the two numbers.
For example, to subtract 5479 from 8923 in base 10, we would follow these steps:
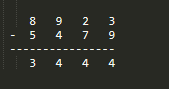
So the difference of 8923 and 5479 is 3444.
(c) List and explain Memory reference instructions in detail.
Memory reference instructions are machine instructions that access memory. These instructions are used to read data from memory, write data to memory, or perform operations on data stored in memory. There are two types of memory reference instructions: load instructions and store instructions.
- Load instructions:
Load instructions are used to read data from memory and load it into a register. There are two types of load instructions:
i. Load immediate instruction: This instruction loads a constant value into a register. The constant value is part of the instruction itself, and is not stored in memory. For example, the instruction “LDI R1, 10” loads the value 10 into register R1.
ii. Load memory instruction: This instruction loads a value from memory into a register. The address of the memory location is specified as an operand. For example, the instruction “LDR R1, 0x1000” loads the value at memory location 0x1000 into register R1.
- Store instructions:
Store instructions are used to write data from a register to memory. There is only one type of store instruction:
i. Store memory instruction: This instruction stores the value in a register to a memory location specified by an operand. For example, the instruction “STR R1, 0x1000” stores the value in register R1 to memory location 0x1000.
Memory reference instructions are fundamental to computer systems, as they enable data to be transferred between memory and the CPU registers. By executing these instructions, programs can read and write data stored in memory, which is essential for performing computations and manipulating data.
(a) What is arithmetic micro operation?
Arithmetic micro operations are basic operations performed on binary data, which includes mathematical operations such as addition, subtraction, multiplication, and division. These operations are performed at the bit level and involve two or more operands.
The inputs and outputs of arithmetic micro-operations are binary numbers, and the operations are performed using the rules of binary arithmetic. For example, adding two binary numbers requires adding the corresponding bits and carrying over any overflow bits to the next position. Similarly, subtraction involves subtracting corresponding bits and borrowing from the next position if necessary.
Arithmetic micro-operations are used extensively in digital computers for performing arithmetic operations on data stored in memory or registers. They are also used for manipulating the contents of the program counter, index registers, and other special-purpose registers. The arithmetic micro-operations are executed by the arithmetic logic unit (ALU), which is a component of the central processing unit (CPU).
(b) What is RAM and ROM?
RAM and ROM are two types of computer memory used to store data and instructions.
RAM, or Random Access Memory, is a type of volatile memory that can be read from and written to by the computer’s CPU. It is used to temporarily store data and instructions that are currently being processed by the CPU. RAM is faster than other types of storage, such as hard drives or solid-state drives, but it is also more expensive and has limited storage capacity. When the computer is turned off or restarted, the data stored in RAM is lost.
ROM, or Read-Only Memory, is a type of non-volatile memory that can only be read from and not written to. It contains instructions that are permanently stored on the computer’s motherboard or in other hardware components, and these instructions cannot be changed or erased by the user. ROM is used to store critical system information, such as the BIOS (Basic Input/Output System) firmware that controls the computer’s boot process. Unlike RAM, the data stored in ROM is not lost when the computer is turned off or restarted.
In summary, RAM is a type of temporary memory used for storing data and instructions that are currently being processed by the CPU, while ROM is a type of permanent memory used for storing critical system information that is required for the computer to function properly.
(c) Draw and explain the working of 4-bit binary adder.
A 4-bit binary adder is a digital circuit that takes two 4-bit binary numbers as input and produces their sum as output. The circuit can be built using logic gates such as AND, OR, and XOR gates, as well as flip-flops and other components.
Here is a diagram of a 4-bit binary adder:

In this circuit, A0 through A3 and B0 through B3 represent the input bits of the two binary numbers to be added. C0 through C4 represents the carry bits generated by each addition, and S0 through S3 represent the sum bits.
The circuit works by performing a full adder operation on each pair of corresponding bits in the two input numbers. The full adder generates a sum bit and a carry bit based on the input bits and the carry bit from the previous addition. The sum bit is added to the output register, and the carry bit is propagated to the next full adder.
For example, to add the binary numbers 0101 and 0011, we would set A3=0, A2=1, A1=0, A0=1 and B3=0, B2=0, B1=1, B0=1.
The first full adder would take A0 and B0 as inputs and produce a sum bit of 0 and a carry bit of 1. The second full adder would take A1, B1, and the carry bit from the previous addition as inputs and produce a sum bit of 0 and a carry bit of 1. The third full adder would take A2, B2, and the carry bit from the previous addition as inputs and produce a sum bit of 1 and a carry bit of 0. Finally, the fourth full adder would take A3, B3, and the carry bit from the previous addition as inputs and produce a sum bit of 1 and a carry bit of 0.
Therefore, the sum of the two input numbers would be 0100 (S3=0, S2=1, S1=0, S0=0).
(c) State and Explain any seven logic micro operation.
- AND: This micro operation performs a logical AND operation on the corresponding bits of two operands. The result of the operation is 1 if and only if both bits are 1, otherwise the result is 0.
- OR: This micro operation performs a logical OR operation on the corresponding bits of two operands. The result of the operation is 0 if and only if both bits are 0, otherwise the result is 1.
- NOT: This micro operation performs a logical NOT operation on the bits of an operand. The result of the operation is the complement of the operand bit.
- XOR: This micro operation performs a logical XOR (exclusive OR) operation on the corresponding bits of two operands. The result of the operation is 1 if and only if the bits are different, otherwise the result is 0.
- Shift: This micro operation shifts the bits of an operand either to the left or right. The direction of the shift is determined by a control signal.
- Rotate: This micro operation rotates the bits of an operand either to the left or right. The rotated out bits are inserted back into the operand on the opposite side. The direction of the rotation is determined by a control signal.
- Clear: This micro operation clears (sets to 0) the bits of an operand.
AND
AND is a binary logic micro operation that produces a logical 1 output only when both input bits are 1. Otherwise, it produces a logical 0 output.
The AND operation is represented by the symbol “&” or “.”. For example, the AND operation between bits A and B is represented as A & B or AB.
The truth table of the AND operation is as follows:
| A | B | A & B |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
In digital circuits, AND gates are used to perform the AND operation on multiple inputs. An AND gate has two or more inputs and one output. The output of an AND gate is 1 only if all of its inputs are 1. Otherwise, its output is 0.
AND gates are fundamental building blocks of digital circuits and are widely used in arithmetic circuits, control circuits, memory circuits, and many other applications.
OR
OR logic micro operation is a logic operation that produces an output of 1 if at least one of its inputs is 1. The OR operation can be represented using the symbol ‘+’ or ‘∨’.
The truth table for OR operation is:
| Input 1 | Input 2 | Output |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |
In digital circuits, OR logic gates are used to implement the OR operation. An OR gate has two or more input lines and one output line. The output of the OR gate is equal to the logical OR of its input signals.
For example, consider a 2-input OR gate with inputs A and B, and output Y. The truth table for this gate is:
| Input A | Input B | Output Y |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |
When both inputs are 0, the output is 0. When one or both inputs are 1, the output is 1. Thus, the OR gate implements the OR logic micro operation.
NOT
The NOT (negation) logic micro operation is a unary operation that takes a single input value and produces the complement or inverse of that value as the output. In other words, it converts 1 to 0 and 0 to 1.
The truth table for the NOT operation is as follows:
| Input | Output |
|---|---|
| 0 | 1 |
| 1 | 0 |
The NOT operation is often used in conjunction with other logic operations to create more complex circuits. For example, a NOT gate can be used to invert the output of an AND or OR gate, or to complement the input to a NAND or NOR gate.
In digital circuits, the NOT operation can be implemented using a transistor or other electronic component to invert the signal. In computer architecture, the NOT operation is commonly used in conjunction with the two’s complement representation to perform arithmetic operations such as negation and subtraction.
XOR
XOR (Exclusive OR) is a logic micro operation that compares two bits and outputs a 1 if they are different and a 0 if they are the same. The truth table for XOR operation is:
| Input A | Input B | Output |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
XOR is often used in digital circuits for operations like error detection and correction, data encryption, and bitwise manipulation. When applied to two values, XOR returns a value that has a bit set in each position where the corresponding bits of the two operands are different.
NAND
NAND (Not AND) logic micro operation is a combination of two basic logic gates, NOT and AND. It produces a LOW output only when both of its inputs are HIGH. In other words, it is the opposite of AND gate, where the output is HIGH only when both inputs are HIGH.
The Boolean expression for NAND operation is:
A NAND B = NOT (A AND B)
In a digital circuit, the NAND gate can be implemented using transistors, and it is commonly used in many applications such as memory circuits, data transmission systems, and microprocessors.
NAND gate is also considered as a universal gate because any logical expression can be implemented using a combination of NAND gates.
NOR
NOR stands for “NOT OR” and is a logic micro operation that performs the logical negation of an OR operation.
In a NOR operation, the output is only 1 when both inputs are 0. In all other cases, the output is 0.
The truth table for a NOR operation is as follows:
| Input A | Input B | Output |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 0 |
XNOR
XNOR, also known as “exclusive-NOR” or “equivalence” operation, is a binary logic micro-operation that compares two binary values and produces a “1” output only when both inputs are equal to each other (either both “1” or both “0”).
The XNOR operation is the logical complement of the XOR operation. In other words, the output of an XNOR operation is the negation of the output of an XOR operation. This can be represented mathematically as:
A XNOR B = NOT(A XOR B)
XNOR operations are commonly used in digital circuits for implementing binary comparators, parity generators/checkers, and other logical functions.
(a) List out Register for basic computer.
The basic computer architecture consists of the following registers:
- Accumulator (AC): It stores the intermediate results of arithmetic and logic operations.
- Program Counter (PC): It stores the address of the next instruction to be executed.
- Memory Address Register (MAR): It stores the memory address of the data to be fetched or stored.
- Memory Buffer Register (MBR): It stores the data to be written into or read from the memory.
- Instruction Register (IR): It stores the current instruction being executed.
- Instruction Decoder (ID): It decodes the instruction stored in the IR and generates control signals for the various parts of the computer.
- Input/Output Registers (I/O): They are used to interface with input/output devices.
- Stack Pointer (SP): It points to the top of the stack, which is used for temporary storage of data during function calls and interrupts.
- Flag Register: It contains the status flags which indicate the outcome of the last arithmetic or logic operation.
(b) Explain register reference instruction format.
Register reference instruction format is a type of machine instruction format that uses registers to store data and perform operations. In this format, the instruction contains the register names and specifies the operation to be performed on the data stored in those registers.
The basic format of a register reference instruction is as follows:
| Opcode | Register 1 | Register 2 | Register 3 |
|---|
Here, Opcode refers to the operation code that specifies the operation to be performed, such as add, subtract, load, or store. Register 1, Register 2, and Register 3 are the registers involved in the operation.
For example, consider the instruction “ADD R1, R2, R3”. This instruction adds the contents of Register 2 and Register 3, and stores the result in Register 1. The opcode is “ADD”, and Register 1, Register 2, and Register 3 are specified as the operands.
Another example is the instruction “MOV R1, R2”. This instruction copies the contents of Register 2 to Register 1. The opcode is “MOV”, and Register 1 and Register 2 are specified as the operands.
The advantage of using register reference instructions is that they can perform operations quickly and efficiently, since registers are typically faster than memory. Additionally, using registers reduces the need to access memory, which can help to improve performance. However, register reference instructions are limited by the number of registers available in the computer, and may require additional memory access if the data cannot fit in the registers.
(c) Explain register transfer using block diagram and timing diagram.
Register transfer refers to the transfer of data between registers or between a register and the outside environment. It is a fundamental operation in digital systems and computer architecture.
The following block diagram illustrates the basic components involved in a register transfer operation:

The control unit generates control signals that activate the source register, destination register, and the bus connecting them. The source register contains the data to be transferred, and the destination register receives the data.
The timing diagram shows the sequence of events that occur during a register transfer operation. The diagram below shows the transfer of data from register A to register B:

The timing diagram shows the following events:
- At time T1, the control unit activates the source register A and makes its contents available on the bus.
- At time T2, the control unit activates the destination register B and transfers the data from the bus into the register.
- At time T3, the control unit deactivates both registers and releases the bus.
The transfer of data from one register to another can be done in a single clock cycle or multiple clock cycles depending on the speed of the system and the size of the data being transferred.
(a) Draw and explain control unit diagram for basic computer.
The control unit of a computer is responsible for controlling the flow of data between the CPU, memory, and input/output devices. It fetches instructions from memory, decodes them, and executes them by sending appropriate signals to other components of the computer.
The control unit typically consists of two major components: the instruction decoder and the control logic. The instruction decoder decodes the instruction fetched from memory and generates control signals that specify the operations to be performed. The control logic receives these control signals and generates control signals for other components of the computer to execute the instruction.
Here is a block diagram of a simple control unit for a basic computer:
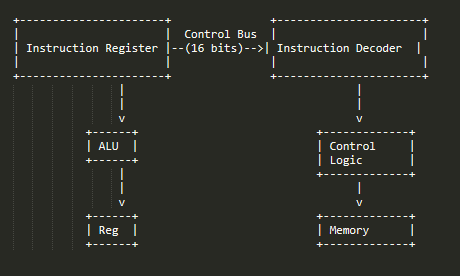
The instruction register (IR) holds the instruction fetched from memory. It is connected to the instruction decoder, which decodes the instruction and generates control signals that specify the operation to be performed.
The control logic receives these control signals and generates control signals for other components of the computer. The ALU (Arithmetic and Logic Unit) performs arithmetic and logical operations on data. The registers hold data and instructions. The memory stores data and instructions.
(b) State various phases of instruction cycle.
The instruction cycle is a process of fetching, interpreting, and executing instructions in a computer. It consists of the following phases:
- Fetch: In this phase, the CPU retrieves the instruction from memory by setting the memory address register (MAR) to the address of the next instruction and the memory data register (MDR) to the contents of that memory location. The instruction is then stored in the instruction register (IR).
- Decode: In this phase, the CPU decodes the instruction in the IR to determine the operation to be performed and the operands involved. The CPU may also determine the addressing mode to be used to access the operands.
- Execute: In this phase, the CPU performs the operation specified by the instruction using the operands obtained in the previous phase. The result is stored in a register or memory location, depending on the instruction.
- Interrupt: In this phase, the CPU checks for any interrupts that may have occurred during the execution of the instruction. If an interrupt is detected, the CPU saves the current state of the program and switches to the interrupt service routine (ISR) to handle the interrupt.
- Store: In this phase, the result of the execution is stored in memory or a register as specified by the instruction. The CPU updates the program counter (PC) to point to the next instruction in memory, and the cycle starts again with the fetch phase.
(c) Explain any four input output reference instruction.
Input/output (I/O) instructions are used to transfer data between the processor and I/O devices. Here are four examples of I/O reference instructions:
- IN (Input): This instruction is used to transfer data from an input device, such as a keyboard or a mouse, to the processor. The instruction specifies the address of the input port from which the data is to be read.
- OUT (Output): This instruction is used to transfer data from the processor to an output device, such as a printer or a display. The instruction specifies the address of the output port to which the data is to be written.
- EI (Enable Interrupts): This instruction is used to enable interrupts, which allow the processor to respond to external events, such as user input or the completion of an I/O operation.
- DI (Disable Interrupts): This instruction is used to disable interrupts, which prevent the processor from responding to external events. This is useful in situations where the processor needs to complete a critical task without interruption.
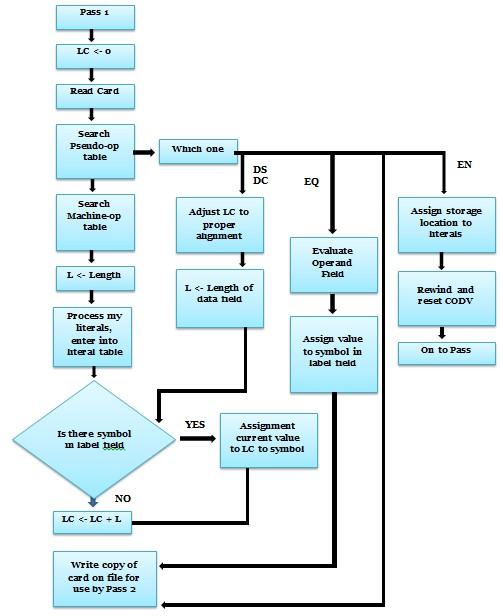
(a) Draw flowchart of first pass assembler.
(b) Write assembly language program to add two numbers.
here’s an example assembly language program to add two numbers in COA
;Program to add two numbers in COA
;Assume first number is stored in memory location 5000 and second number in 5001
ORG 0000H ;Start address of the program
MOV A, 5000H ;Load first number to accumulator
ADD A, 5001H ;Add second number to accumulator
STA 5002H ;Store result in memory location 5002
HLT ;End of program
In this program, we assume that the first number is stored in memory location 5000 and the second number is stored in memory location 5001. The program loads the first number to the accumulator using the MOV instruction, adds the second number to the accumulator using the ADD instruction, and stores the result in memory location 5002 using the STA instruction.
Finally, the program uses the HLT instruction to indicate the end of the program.
(c) Write assembly language program to multiply two numbers.
Here’s an example assembly language program to multiply two numbers in COA
Program to multiply two numbers
Data Section
.section .data
num1: .long 5 # first number
num2: .long 7 # second number
result: .long 0 # to store the result
Text Section
.section .text
.globl _start
_start:
# load the first number into eax
movl num1, %eax
# multiply the first number with the second number
imul num2
# store the result in the memory location reserved for result
movl %eax, result
# exit the program
movl $1, %eax # 1 indicates exit status
xorl %ebx, %ebx # ebx is set to zero
int $0x80 # invoke the operating system to exitIn this program, the first number (5) is stored in the memory location labeled “num1”, the second number (7) is stored in the memory location labeled “num2”, and a memory location labeled “result” is reserved to store the result of the multiplication.
The program starts by loading the first number into the EAX register using the “movl” instruction. The “imul” instruction is then used to multiply the value in EAX with the second number stored in memory. The result of the multiplication is stored in the EAX register.
Finally, the result is moved from the EAX register to the memory location reserved for it using the “movl” instruction. The program then exits using the system call “int $0x80” with the exit status set to 1.
(a) What is address sequencing?
Address sequencing refers to the process of generating memory addresses in a sequential manner during the execution of a computer program. It involves the generation of a sequence of memory addresses that correspond to the locations in memory where the instructions and data of a program are stored. Address sequencing is an important aspect of the instruction cycle and is controlled by the instruction fetch and decode phase of the processor. It involves the calculation of the address of the next instruction to be fetched and the transfer of that address to the memory unit. The address sequencing process is usually performed by the control unit of the processor, which generates and manages the sequence of memory addresses required by the program.
(b) Write assembly language program to subtract one number from other
number.
Here is an example of an assembly language program to subtract one number from another number in x86 architecture:
section .data
num1 dw 5 ;first number to be subtracted
num2 dw 3 ;second number
result dw 0 ;initialize result to 0
section .text
global _start
_start:
mov ax, num1 ;move the value of num1 to the AX register
sub ax, num2 ;subtract the value of num2 from AX
mov result, ax ;store the result in memory location result
;exit program
mov eax, 1 ;system call for exit
xor ebx, ebx ;exit status code 0
int 0x80 ;invoke system callThis program subtracts the value of num2 from num1 and stores the result in the memory location result. The sub instruction performs the subtraction operation and stores the result in the AX register. The mov instruction then moves the value of AX to the memory location result. Finally, the program exits using the system call for exit with exit status code 0.
(c) Explain booth’s multiplication algorithm with example.
Booth’s multiplication algorithm is an algorithm used for multiplying two binary numbers. It was invented by Andrew Donald Booth in 1950.
The steps of Booth’s multiplication algorithm are as follows:
- First, the two binary numbers to be multiplied, multiplicand (M) and multiplier (Q), are written in two separate rows.
- An extra bit (Q-1) is added to the left of the multiplier row and set to 0.
- Then, a loop is executed for n times (where n is the number of bits in the binary numbers) to perform the multiplication.
- Inside the loop, the last two bits of the multiplier row (Q-1, Q0) are examined.
- If the bits are ’01’, the multiplicand is subtracted from the partial product (P), which is initially set to 0, and the result is stored back in the partial product.
- If the bits are ’10’, the multiplicand is added to the partial product, and the result is stored back in the partial product.
- The multiplier is then shifted right by 1 bit, and the most significant bit (MSB) of the partial product is shifted left by 1 bit and stored in the Q-1 bit position.
- The loop is repeated until n iterations are completed.
- Finally, the partial product contains the result of the multiplication.
Example:
Let’s say we want to multiply 0110 (6 in decimal) and 1011 (-5 in two’s complement representation). We will use 8-bit numbers for this example.
Step 1: Write the binary numbers in two separate rows.
0110 <- Multiplicand (M)
x 1011 <- Multiplier (Q)Step 2: Add an extra bit (Q-1) to the left of the multiplier row.
0110 <- Multiplicand (M)
x 01011 <- Multiplier (Q)Step 3: Execute the loop for 5 times (since we are using 8-bit numbers).
Iteration 1:
0110 <- Multiplicand (M)
x 01011 <- Multiplier (Q)
--------
0110 <- Partial product (P)
Q-1 Q0 <- Last two bits of Q
0 1
Since the last two bits of Q are '01', we need to subtract the multiplicand from the partial product:
0110 <- Partial product (P)
- 0110 <- Multiplicand (M)
--------
0000 <- Result
The result is stored back in the partial product:
0000 <- Partial product (P)
The multiplier is shifted right by 1 bit:
0110 <- Multiplicand (M)
x 101 <- Multiplier (Q)
The MSB of the partial product is shifted left by 1 bit and stored in Q-1 bit position:
00000 <- Partial product (P)
Q-1 Q0 <- Last two bits of Q
0 0Iteration 2:
0110 <- Multiplicand (M)
x 101 <- Multiplier (Q)
--------
0110 <- Partial product (P)
Q-1 Q0 <- Last two bits of Q
1 0
Since the last two bits of Q are '10', we need to add the multiplicand to the partial product:
0110 <- Partial product (P)
+ 0110 <- Multiplicand
(a) Explain register stack.
A register stack is a type of computer memory organization that uses registers instead of memory locations for storing data temporarily. In this memory organization, the registers are arranged in a stack-like structure, with the top register serving as the current stack pointer.
The register stack can be used for performing operations such as subroutine calls, nested subroutine calls, and other operations that require temporary storage of data. The register stack is faster than the main memory since it takes less time to access the register as compared to accessing the memory.
In a register stack, the push operation stores data in the top register and increments the stack pointer, whereas the pop operation retrieves data from the top register and decrements the stack pointer. The register stack is often used in microcontrollers and embedded systems due to its speed and simplicity.
However, the register stack has limited capacity since the number of registers in a computer is usually small. In addition, the register stack is volatile, which means that the data stored in the stack is lost when the power is turned off. As a result, the register stack is only suitable for storing temporary data and not for permanent storage.
(b) What is difference between two address and three address instructions?
In computer architecture, two address instructions and three address instructions are two different types of instructions used in assembly language programming. The main difference between the two is the number of operands they use.
Two address instructions are instructions that have two operands, where one operand acts as a source and the other acts as a destination. In this type of instruction, the result is usually stored in the destination operand, and the source operand is not modified.
Example of two address instructions: ADD A, B (Add the contents of registers A and B and store the result in A)
Three address instructions are instructions that have three operands, where two operands act as sources and one acts as a destination. In this type of instruction, the result is usually stored in the destination operand, and both source operands can be modified.
Example of three address instructions: ADD A, B, C (Add the contents of registers B and C and store the result in A)
In summary, the main difference between two address instructions and three address instructions is the number of operands they use, which affects how the instructions are executed and the type of operations they can perform.
(c) Write a note on asynchronous data transfer.
Asynchronous data transfer is a type of data transfer technique in which data is transferred between devices or systems without the use of a common clock signal. Instead, the data transfer is initiated by a start signal from the sender and completed by an acknowledgment signal from the receiver.
In asynchronous data transfer, each character is separated by a synchronization character, usually a start bit and a stop bit. The sender sends the start bit to indicate the start of the transmission, followed by the data bits, and then the stop bit to indicate the end of the transmission. The receiver waits for the start bit and then reads the data bits until it receives the stop bit.
One advantage of asynchronous data transfer is that it does not require a common clock signal, which reduces the complexity of the system and simplifies the design of the hardware. However, it has a lower data transfer rate compared to synchronous data transfer, and it is not suitable for long-distance communication due to the possibility of errors and data loss.
(a) What is difference between direct and indirect addressing mode?
In computer architecture and assembly language programming, addressing modes are used to specify how an operand or data is located in memory or register. There are various addressing modes, but two of the most common ones are direct addressing mode and indirect addressing mode.
Direct addressing mode refers to an instruction that specifies the actual memory location or register where the operand or data is stored. In other words, the memory location or register is directly specified in the instruction itself. For example, in the following instruction:
MOV AX, [1234H]
the operand is stored in the memory location 1234H, and the instruction directly specifies this location using the square brackets.
Indirect addressing mode, on the other hand, refers to an instruction that specifies the memory location or register where the address of the operand or data is stored, rather than the operand or data itself. In other words, the memory location or register that contains the address of the operand is indirectly specified in the instruction. For example, in the following instruction:
MOV AX, [BX]
the memory location containing the address of the operand is stored in the BX register, and the instruction indirectly specifies this location by using the contents of the BX register.
In summary, the main difference between direct and indirect addressing mode is that direct addressing mode directly specifies the memory location or register where the operand or data is stored, while indirect addressing mode specifies the memory location or register where the address of the operand or data is stored.
(b) Explain arithmetic pipeline.
Arithmetic pipeline is a technique used in computer architecture to increase the efficiency of arithmetic operations. It is a type of pipeline processing that allows multiple arithmetic operations to be executed simultaneously by dividing them into multiple stages.
The pipeline consists of several stages, each of which performs a specific arithmetic operation, such as addition, subtraction, multiplication, or division. Each stage in the pipeline is designed to process one part of the arithmetic operation, with the output of each stage being passed on to the next stage in the pipeline. The stages can operate in parallel, which allows multiple arithmetic operations to be executed at the same time.
The stages in an arithmetic pipeline typically include:
- Operand fetch: This stage retrieves the operands needed for the arithmetic operation from memory or registers.
- Instruction decode: This stage decodes the instruction that specifies the arithmetic operation to be performed.
- Execution: This stage performs the arithmetic operation.
- Write-back: This stage writes the result of the arithmetic operation back to memory or registers.
Arithmetic pipelines can be used to speed up the execution of arithmetic operations, as they allow multiple operations to be executed simultaneously. However, there are also some potential drawbacks to using arithmetic pipelines. For example, if there are dependencies between the arithmetic operations being executed, such as one operation depending on the result of another, then the pipeline may need to stall, which can reduce the overall efficiency of the pipeline.
(c) Write a short note on virtual memory.
Virtual memory is a technique used in computer systems to allow programs to access more memory than is physically available. It is a memory management technique that involves the use of secondary storage, such as a hard disk, to simulate additional main memory.
In virtual memory, each program is divided into a series of pages, with each page being loaded into main memory only when it is needed. When a page is not needed, it can be swapped out to the hard disk, freeing up main memory for other programs to use. This allows programs to use more memory than is physically available and enables efficient sharing of memory between multiple programs.
The operating system maintains a page table, which keeps track of which pages are currently in main memory and which pages are on disk. When a program attempts to access a page that is not currently in main memory, a page fault occurs and the operating system retrieves the required page from disk, updates the page table, and restarts the instruction that caused the page fault.
Virtual memory has several benefits, including:
- It allows programs to access more memory than is physically available, which can increase system performance and enable the execution of larger programs.
- It enables efficient sharing of memory between multiple programs, reducing the overall memory requirements of the system.
- It provides a level of protection for programs, as each program has its own virtual address space that is isolated from other programs.
However, virtual memory can also have performance drawbacks, as the process of swapping pages between main memory and disk can be slow. In addition, it requires additional overhead in the form of the page table and page fault handling.
Read More, COA Winter 2022 GTU Paper Solution
“Do you have the answer to any of the questions provided on our website? If so, please let us know by providing the question number and your answer in the space provided below. We appreciate your contributions to helping other students succeed.”