Here, We provide KTM GTU Paper Solution Winter 2021. Read the Full Kinematics and theory of machines gtu paper solution given below.
(a) Define the following term:
a) Kinematic chain
b) Degree of freedom
c) Mechanism
When the kinematic pairs are coupled in such a way that the last link is joined to the first link to transmit definite motion (i.e. completely or successfully constrained motion), it is called a kinematic chain.
It is the number of inputs (number of independent coordinates) required to describe the configuration or position of all the links of the mechanism, with respect to the fixed link at any given instant called degrees of freedom
If a number of bodies are assembled in such a way that the motion of one causes constrained and predictable motion to the others, it is known as a mechanism.
(b) Explain different types of kinematic pairs.
According to the type of relative motion between the elements
a) Sliding pair
When the two elements of a pair are connected in such a way that one can only slide relative to the other, the pair is known as a sliding pair.
b) Turning pair
When the two elements of a pair are connected in such a way that one can only turn or revolve about a fixed axis of another link, the pair is known as turning pair.
c) Rolling pair
When the two elements of a pair are connected in such a way that one rolls over another fixed link, the pair is known as rolling pair.
d) Screw pair
When the two elements of a pair are connected in such a way that one element can turn about the other by screw threads, the pair is known as screw pair.
e) Spherical pair
When the two elements of a pair are connected in such a way that one element (with the spherical shape) turns or swivels about the other fixed element, the pair formed is called a spherical pair.
According to the type of contact between the elements
a) Lower pair
When the two elements of a pair have a surface contact when relative motion takes place and the surface of one element slides over the surface of the other, the pair formed is known as lower pair.
b) Higher pair
When the two elements of a pair have a line or point contact when relative motion takes place and the motion between the two elements is partly turning and partly sliding, then the pair is known as higher pair.
According to the type of closure
a) Self closed pair
When the two elements of a pair are connected together mechanically in such a way that only required kind of relative motion occurs, it is then known as self-closed pair.
b) Force – closed pair
When the two elements of a pair are not connected mechanically but are kept in contact by the action of external forces, the pair is said to be a force-closed pair.
(c) Explain various inversion of double slider kinematic chain with examples.
Following are the Inversions of Double Slider Crank Chain:
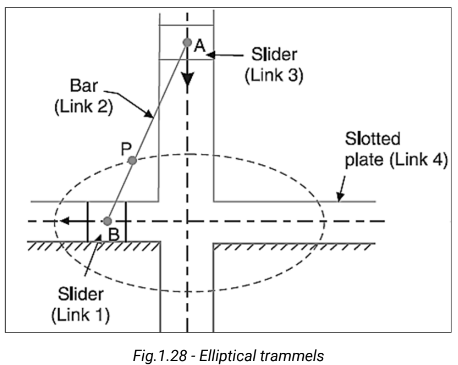
- Elliptical trammels
This inversion is obtained by fixing the slotted plate (link 4).
The fixed plate or link 4 has two straight grooves cut in it, at right angles to each other. Link 1 and link 3, are known as sliders and form sliding pairs with link 4.
The link AB (link 2) is a bar which forms turning pair with links 1 and 3. When the links 1 and 3 slides along their respective grooves, any point on link 2 such as P traces out an ellipse on the surface of link 4.
Application: It is an instrument used for drawing ellipses
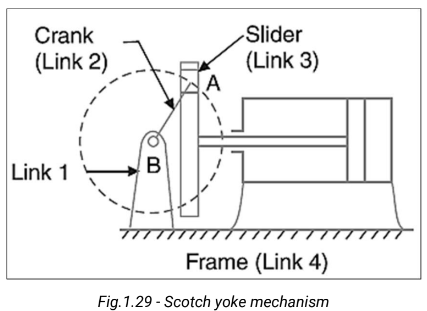
- Scotch yoke mechanism
The inversion is obtained by fixing either the link 1 or link 3. Link 1 is fixed.
In this mechanism, when the link 2 (which corresponds to crank) rotates about B as center, the link 4 (which corresponds to a frame) reciprocates. The fixed link 1 guides the frame.
Application: This mechanism is used for converting rotary motion into a reciprocating motion
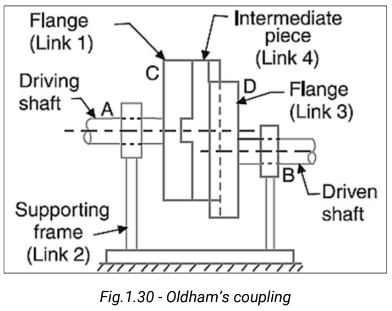
- Oldham’s coupling
The shafts are coupled in such a way that if one shaft rotates, the other shaft also rotates at the same speed. This inversion is obtained by fixing the link 2. The shafts to be connected have two flanges (link 1 and link 3) rigidly fastened at their ends by forging.
Application: It is used for connecting two parallel shafts whose axes are at a small distance apart
(a) Describe working principle of internal expanding shoe brake with a neat sketch.
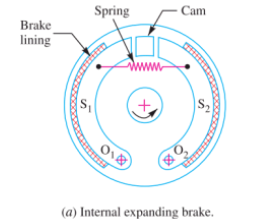
An internal expanding brake consists of two shoes S1 and S2. The outer surface of the shoes are lined with some friction material (usually with Ferodo) to increase the coefficient of friction and to prevent wearing away of the metal. Each shoe is pivoted at one end about a fixed fulcrum O1and O2 and made to contact a cam at the other end.
When the cam rotates, the shoes are pushed outwards against the rim of the drum. The friction between the shoes and the drum produces the braking torque and hence reduces the speed of the drum. The shoes are normally held in off position by a spring . The drum encloses the entire mechanism to keep out dust and moisture. This type of brake is commonly used in motor cars and light trucks
(b) Construct three position synthesis of single slider crank mechanism by relative
pole method.
(c) A four bar mechanism is to be designed, by using three precision points, to
generate the function y = x^1.5 , for the range 1 ≤ x ≤ 4 . Assuming 30° starting
position and 120° finishing position for the input link and 90° starting position
and 180° finishing position for the output link, find the values of x, y, θ and φ
corresponding to the three precision points.
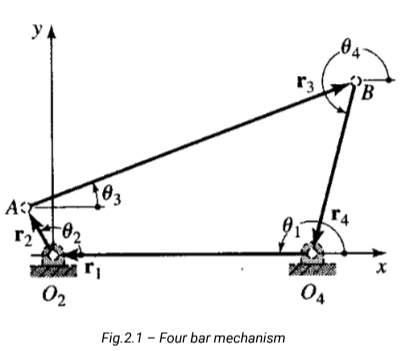
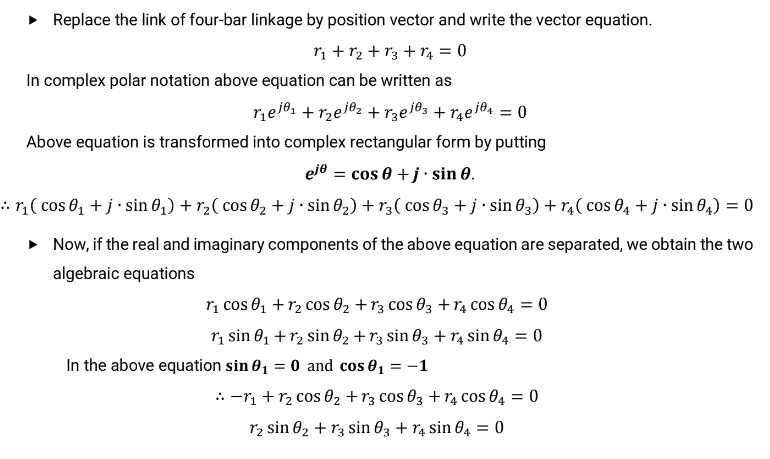
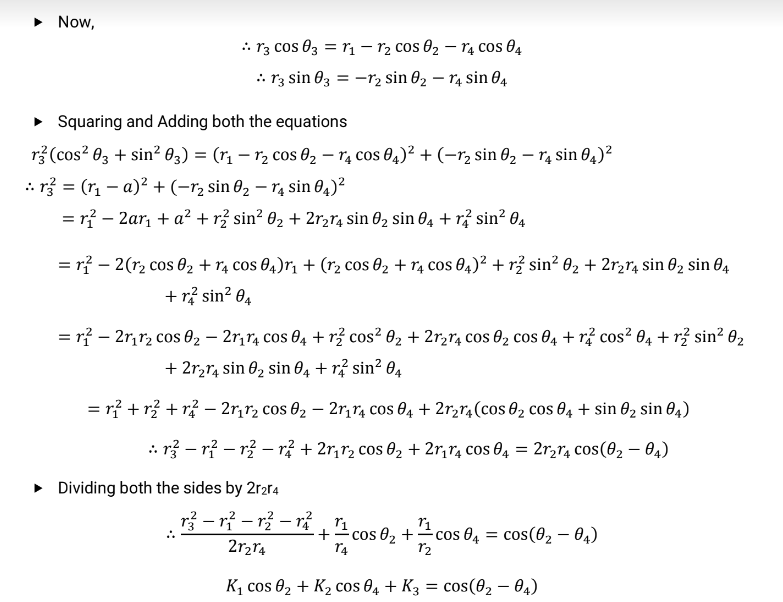
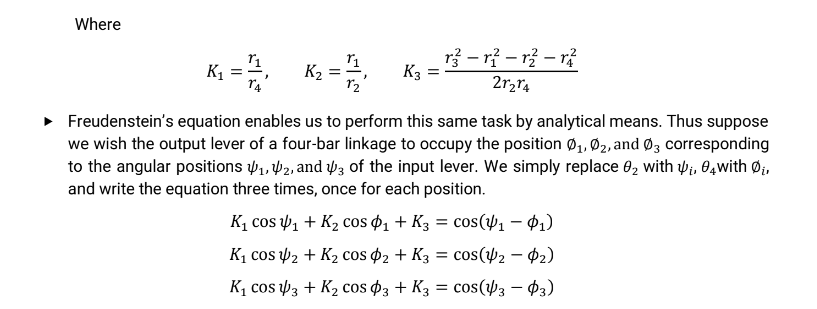
[or] (c) Derive Freudenstein’s equation for four bar mechanism.
(a) Explain and prove Arnold Kennedy theorem.
Aronhold Kennedy’s theorem states that “if three bodies move relative to each other, they have three instantaneous centres and lie on a straight line.”
Consider three kinematic links A, B and C having relative plane motion. The number of instantaneous centres (N) is given by
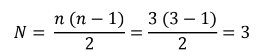
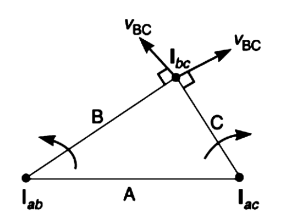
The two instantaneous centres at the pin joints of B with A and C with A (i.e. Iab and Iac) are the permanent instantaneous centre. According to Aronhold Kennedy’s theorem, the third instantaneous centre Ibc must lie on the line joining Iab and Iac.
In order to prove this, let us consider that the instantaneous centre Ibc lies outside the line joining Iab and Iac as shown in Fig.3.8.
The point Ibc belongs to both the links B and C.
Let us consider the point Ibc on the link B. Its velocity VBC must be perpendicular to the line joining Iab and Ibc.
Now consider the point Ibc on the link C. Its velocity VBC must be perpendicular to the line joining Iac and Ibc.
(b) Define the terms:
a) Instantaneous center
b) Body centrode & Space centrode
c) Relative velocity
a) Instantaneous Center: The Instantaneous Center (IC) is a theoretical point in a plane, used in mechanics to describe the instantaneous velocity and acceleration of a moving body. It is the center of rotation of a body about an axis perpendicular to the plane of motion and is determined by the velocity and acceleration of the body at a specific moment in time.
b) Body Centrode & Space Centrode: A body centrode is the center of gravity of a body, calculated by considering the mass distribution of the body. The space centrode is the center of gravity of a body in space, calculated by considering the mass distribution of the body and its orientation in space.
c) Relative Velocity: Relative velocity is the velocity of an object relative to another object, which is determined by subtracting the velocity of one object from the velocity of the other. It represents the speed and direction of motion of an object as seen by an observer in a reference frame relative to the observer’s own frame of reference.
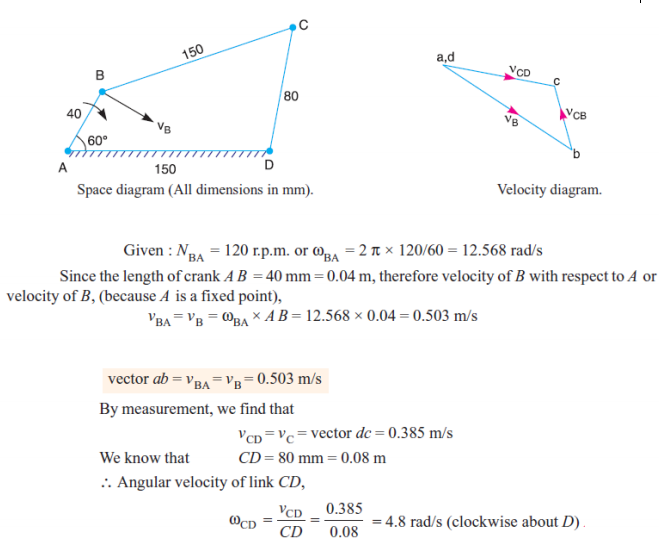
(c) In a four bar chain ABCD, AD is fixed and is 150 mm long. The crank AB is 40
mm long and rotates at 120 r.p.m. clockwise, while the link CD = 80 mm oscillates
about D. BC and AD are of equal length. Find the angular velocity of link CD when
angle BAD = 60º.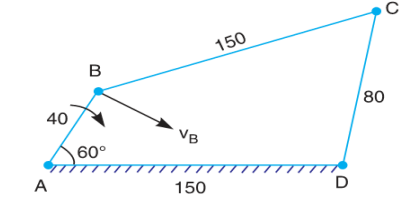
(a) Explain coriolis component and derive its equation
The Coriolis component is a term used to describe the acceleration experienced by an object moving in a rotating reference frame. The Coriolis effect is a fundamental principle of classical mechanics and is caused by the rotation of the Earth (or any other rotating reference frame).
The equation for the Coriolis component is given by:
a_cor = -2 * omega * v
where: a_cor is the Coriolis acceleration, omega is the angular velocity of the rotating reference frame, and v is the velocity of the object relative to the rotating reference frame
The equation for the Coriolis component is based on the principles of Newton’s second law of motion, which states that the acceleration of an object is proportional to the force acting on it. In a rotating reference frame, an object moving in a straight line will experience an acceleration perpendicular to its velocity due to the Coriolis effect. This acceleration is proportional to the angular velocity of the rotating reference frame and the velocity of the object.
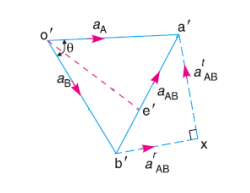
(b) Draw an acceleration diagram of single slider crank mechanism.
(c) An engine mechanism is shown in fig. The crank CB=100mm and the connecting
rod BA=300 mm with G point 100 mm from B. In the position shown, the crank
shaft has a speed of 75 rad/sec and an angular acceleration of 1200 rad/sec^2
. Find velocity of G and angular velocity of AB and 2. acceleration of G and angular
acceleration of AB.
Refer this : Click Here to get the full Solution of this Question
(a) Classify the toothed gear
Toothed gears are classified based on various criteria, including their shape, tooth profile, and the direction of tooth engagement. Some of the common classifications of toothed gears are:
According to Shape:
Spur gears: Gears with straight teeth, usually used to transmit power between parallel shafts.
Helical gears: Gears with oblique teeth arranged in a helical pattern, used to transmit power between non-parallel shafts.
Bevel gears: Gears with beveled teeth, used to transmit power between intersecting shafts.
Worm gears: Gears with a worm screw and a worm wheel, used to transmit power at high reductions and high efficiency.
According to Tooth Profile:
Involute gears: Gears with involute tooth profiles, which provide constant contact and reduce noise and wear.
Cycloidal gears: Gears with cycloidal tooth profiles, used in special applications due to their high accuracy and efficiency.
Trochoidal gears: Gears with trochoidal tooth profiles, used in high-speed and high-load applications.
According to Direction of Tooth Engagement:
External gears: Gears with teeth that engage from the outside, where the gear is meshed with another gear from the outside.
Internal gears: Gears with teeth that engage from the inside, where the gear is meshed with another gear from the inside.
(b) State and derive law of gearing.
(c) Design a cam for operating the exhaust valve of an oil engine. It is required to
give equal uniform acceleration and retardation during opening and closing of the
valve each of which corresponds to 60º of cam rotation. The valve must remain in
the fully open position for 20º of cam rotation. The lift of the valve is 37.5mm and the least radius of the cam is 40mm. The follower is provided with a roller of radius 20mm and its line of stroke passes through the axis of cam.
Refer this : Click Here to get the full Solution of this Question
(a) Define the terms:
a) pressure angle
b) helix angle
c) circular pitch
a) Pressure Angle: Pressure angle is a term used in the design of gears, and is defined as the angle between the common normal to the two profiles of the meshing gears and the line of action of their engagement.
b) Helix Angle: Helix angle is a term used in the design of helical gears, and is defined as the angle between the tooth profile of the gear and its axis of rotation. It determines the direction and magnitude of the axial forces generated in the gear transmission and affects the load capacity, efficiency, and noise level of the gears.
c) Circular Pitch: Circular pitch is a term used in the design of gears, and is defined as the distance along the circumference of a gear from a point on one tooth to the corresponding point on the next tooth, measured along the pitch circle.
(b) Explain the term ‘Interference’ as applied to gears.
Interference in gears refers to the phenomenon where two or more gear teeth come into contact with each other at the same time, causing damage or excessive wear to the teeth. It occurs when the center distance between the gears is too small, causing the gear teeth to overlap and interfere with each other during operation.
Interference can lead to several issues, including increased noise, vibration, and wear, and can also cause the gears to seize or fail. It can be caused by a variety of factors, including manufacturing inaccuracies, misalignment of the gear shafts, incorrect installation of the gears, or excessive load on the gears.
To avoid interference in gears, it is important to carefully consider the design of the gear system, including the center distance, the gear profile, and the load capacity. It is also important to ensure that the gears are installed and aligned correctly, and that the system is operated within the design limits to avoid excessive loads and wear.
In some cases, interference can be reduced or eliminated by modifying the design of the gear system, such as by using a different gear profile, changing the center distance, or using a different material for the gears. In other cases, interference may be unavoidable, and the gears must be designed to withstand the effects of interference through the use of special materials, coatings, or manufacturing processes.
(c) A cam rotating CW at a uniform speed of 1000 rpm is required to give a roller
follower the motion defined below:
Follower move outwards through 50 mm during 120º of cam rotation
Follower to dwell for next 60º of cam rotation
Follower to return to its starting position during next 90º of cam rotation
Follower to dwell for the rest of the cam rotation.
The minimum radius of the cam is 50 mm and diameter of roller is 10mm. The
line of stroke of the follower is off set by 20mm from the axis of the cam shaft. If
the displacement of the follower takes place with uniform and equal acceleration
and retardation on both the outward and return strokes, draw the profile of cam.
Refer this : Click Here to get the full Solution of this Question
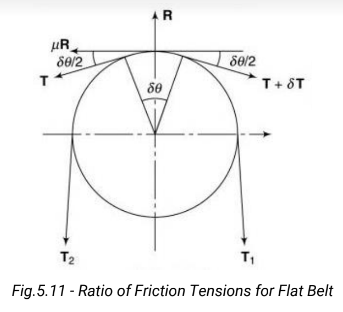
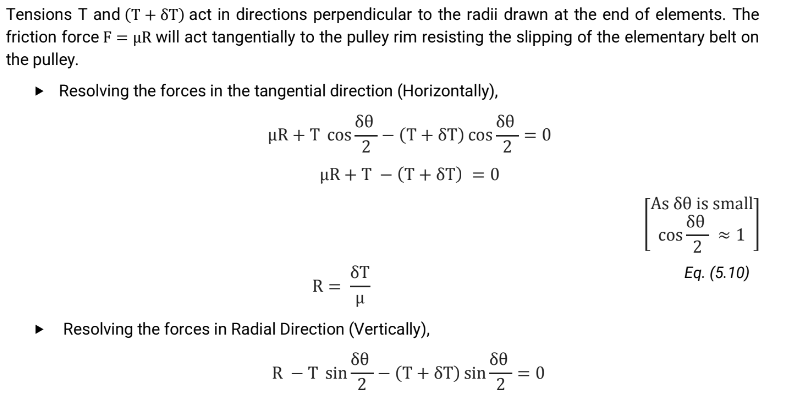
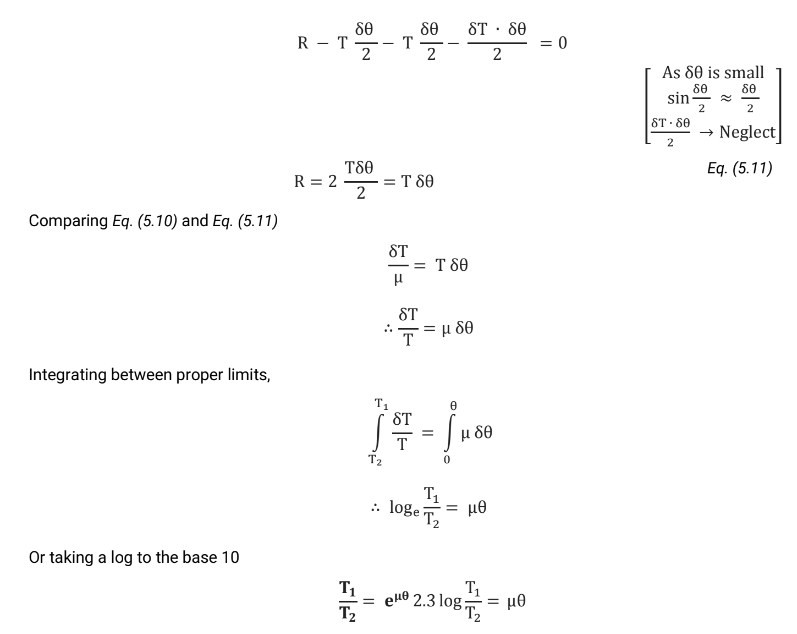
(a) Derive the empirical relation for the ratio of driving tensions for flat belt drive.
(b) A casting weighing 9 kN hangs freely from a rope which makes 2.5 turns round a
drum of 300 mm diameter revolving at 20 r.p.m. the other end of the rope is pulled
by a man. The coefficient of friction is 0.25. Determine: (1) The force required by
the man and (2) the power to raise the casting.
Given: W= T1= 9 kN =9000N, d= 0.3 m, N = 20 rpm , µ= 0.25
(i) Force reqd. by a man
T2- force reqd. by man
As rope makes 2.5 turns,
Therefore angle of contact ,
θ =2.5×2π = 5 π rad.
We know that,
2.3 log {T1/T2} = µ θ = 0.25 x 5 π = 3.9275
log {T1/T2} = 3.9275/2.3 = 1.71 or T1/T2 = 51
T2 = 9000/51 = 176.47 N
(ii) Power to raise casting :
As velocity of rope, v = πdN/60 = 3.14×0.3×20/60 = 0.3142 m/s
Power to raise casting = (T1-T2) x v = (9000-176.47) x 0.3142
= 2.772 kW.
(c) A multi disc clutch has three discs on the driving shaft and two on the driven shaft.
The outside diameter of the contact surfaces is 240mm and inside diameter
120mm. Assuming uniform wear and coefficient of friction as 0.3, find the
maximum axial intensity of pressure between the discs for transmitting 25 KW at
1575 rpm.
Refer this : Click Here to get the full Solution of this Question
(a) Define the terms:
a) Dry friction
b) film friction
c) limiting angle of friction
(a) Dry friction occurs when there is relative motion between two completely unlubricated surfaces.
(b) When the two surfaces in contact are completely separated by a lubricant, friction will occur due to the shearing of different layers of the lubricant. This is known as film friction or viscous friction.
(c) The limiting angle of friction, also known as the angle of repose, is the maximum angle at which a surface or material can maintain its stability without slipping or sliding. It is the angle between the surface of a body and the horizontal plane, beyond which the body is no longer able to remain stationary and begins to slide or roll down the surface.
(b) Describe with a neat sketch the working of a single plate clutch.
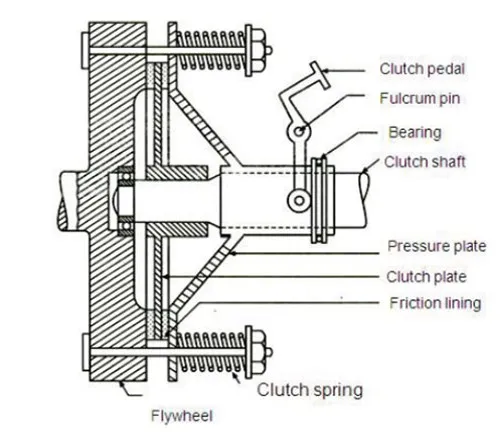
A single plate clutch is a mechanical device that is used to transmit torque from one rotating shaft to another. It consists of a friction plate, which is attached to the flywheel of an engine, and a pressure plate, which is attached to the transmission. When the clutch is engaged, the pressure plate applies pressure to the friction plate, causing the two to grip each other and transmit torque from the engine to the transmission.
When the clutch is disengaged, the pressure plate moves away from the friction plate, breaking the grip between the two and allowing them to rotate independently. This allows the engine to continue running without transmitting torque to the transmission, allowing the vehicle to come to a stop without stalling.
The clutch is typically controlled by a pedal or lever, which is used to apply pressure to the pressure plate and engage or disengage the clutch as needed. The amount of pressure applied to the pressure plate, and thus the amount of grip between the friction plate and the pressure plate, is regulated by a series of springs that are designed to provide the optimal balance of torque transmission and ease of use.
(c) A shaft rotating at 200 r.p.m. drives another shaft at 300 r.p.m. and transmits 6
kW through a belt. The belt is 100 mm wide and 10 mm thick. The distance
between the shafts is 4 m. the smaller pulley is 0.5 m in diameter. Calculate the
stress in the belt, if it is (1) an open belt drive, and (2) a cross belt drive. Take µ
= 0.3.
Refer this : Click Here to get the full Solution of this Question
Read More : ETC GTU Paper Solution Winter 2021
Read More : Indian Constitution GTU Paper Solution Winter 2021
“Do you have the answer to any of the questions provided on our website? If so, please let us know by providing the question number and your answer in the space provided below. We appreciate your contributions to helping other students succeed.